
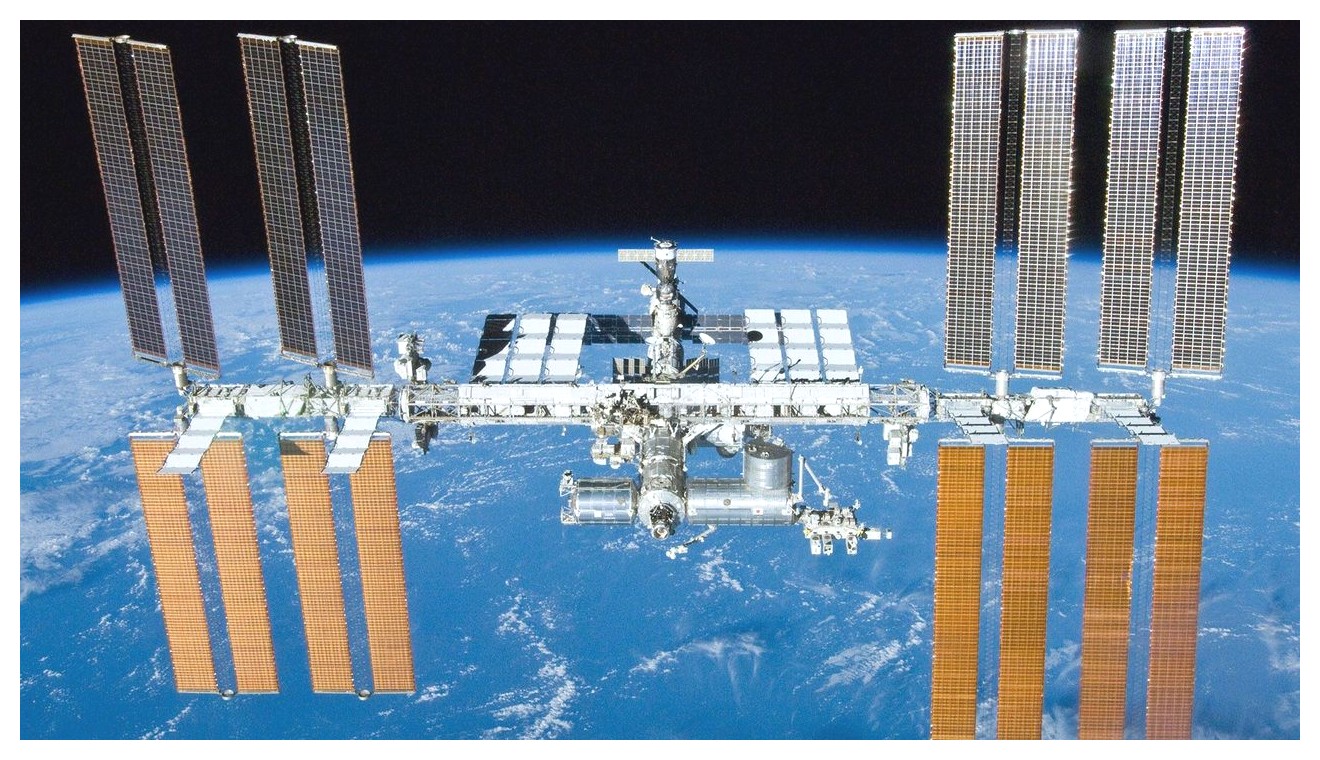
ناسا برای نخستین بار از هوش مصنوعی در ایستگاه فضایی بینالمللی (ISS) استفاده کرده است. این فناوری جدید توانسته است سرعت ناوبری ربات حاضر در ایستگاه را حدود ۵۰ تا ۶۰ درصد افزایش دهد، که این دستاورد نشاندهنده پیشرفتهای قابل توجه در کنترل حرکت مبتنی بر یادگیری ماشین در فضا است.
رباتیک خودگردان در فضا
با همکاری پژوهشگران دانشگاه استنفورد و سامانه ربات پرنده ناسا به نام آستروبی (Astrobee)، این ربات اکنون میتواند با سرعت بیشتری در محیط داخلی ایستگاه فضایی حرکت کند. این پیشرفت به فضانوردان کمک میکند تا از رباتها برای انجام کارهای روزمره استفاده کنند و چشمانداز آیندهای را به تصویر میکشد که در آن ماشینها میتوانند وظایف بیشتری را بهصورت مستقل انجام دهند.
چالشهای ناوبری در ایستگاه فضایی بینالمللی
فضای داخلی ایستگاه فضایی بینالمللی به شدت شلوغ و فشرده است. دیوارهها با تجهیزات مختلفی مانند لپتاپها، دوربینها و محفظههای نگهداری پر شدهاند. این شرایط باعث میشود که ناوبری رباتها به ویژه در شرایط ریزگرانش بسیار دشوار باشد. الگوریتمهای مسیریابی سنتی به توان پردازشی بالایی نیاز دارند که در رایانههای پرواز قابل استفاده در فضا موجود نیست.
روش هوش مصنوعی و افزایش سرعت ناوبری
تیم تحقیقاتی با آموزش یک مدل یادگیری ماشین با استفاده از هزاران مسیر از پیش تعریفشده، به ربات این امکان را دادهاند که پیشبینیهای دقیقی از مسیرهای مناسب داشته باشد. این رویکرد ترکیبی به حفظ محدودیتهای ایمنی ناسا کمک کرده و سرعت برنامهریزی مسیر را به طور چشمگیری افزایش میدهد. در موقعیتهای دشوار، این روش توانسته است سرعت عملکرد را ۵۰ تا ۶۰ درصد افزایش دهد.
آزمونهای زمینی و آزمایشهای مداری
آزمایشهای زمینی این سامانه قبل از ارسال به ایستگاه فضایی بینالمللی در مرکز پژوهشی Ames ناسا انجام شد. پس از قرار گرفتن در مدار، فضانوردان تنها در مرحله آمادهسازی کمک کردند و تمام عملیات اصلی از زمین هدایت شد. نتایج آزمایشها نشان داد که روش مبتنی بر هوش مصنوعی در تمامی موارد عملکرد بهتری نسبت به روشهای سنتی داشته است.
تأیید ناسا و کاربردهای آینده
این فناوری اکنون به سطح آمادگی فناوری ۵ (TRL-5) رسیده است، به این معنا که کارکرد آن در محیط عملیاتی واقعی تأیید شده است. این پیشرفت به کاهش ریسک پروژههای آینده که به رباتهای خودگردان متکی هستند، کمک میکند. تیم تحقیقاتی در نظر دارد مدلهای پیشرفتهتری را ادغام کند تا رباتهایی با تواناییهای استدلال و برنامهریزی بهتری ساخته شوند، که میتوانند در مأموریتهای آینده به فضانوردان کمک کنند.





")